纯电动载人多旋翼飞行器设计
前言
关于电动垂直起降(eVTOL)载人飞行器的设计,国内外已有多家公司提出过多种不同方案。由于是商业行为,我们很难获取这些方案的详细设计参数和设计理念。
NASA Ames研究中心的Wayne Johnson教授等人在ASH技术峰会上发表过一篇关于VTOL飞行概念设计的论文。文章详细介绍了一款电动垂直起降飞行器的概念设计。文中的一些设计理念非常具有借鉴意义。本文加以整理,与大家分享。
设计需求
设计一款单人纯电动多旋翼飞行器。任务载荷为250lb(113Kg)。美国适航条例规定乘客平均重量为170lb(77Kg),随着人类平均体重的增加,一般乘客的平均重量按照200lb(90Kg)进行计算。额外计算50lb(23Kg)的个人物品,因此单人飞行器的任务载荷重量共计113Kg。任务航程为50nm(93Km)。可满足在5000英尺(1500m)的高度飞行。
任务分析
起飞阶段:满足2分钟无地效悬停
巡航阶段:以远航速度飞行93Km
降落阶段:满足2分钟无地效悬停
安全余量:10%任务航程或20分钟航时(久航速度下)
所有的飞行阶段按照5000英尺高度计算,温度为ISA+20℃(标准大气环境下,1500英尺高度对应温度为5℃,外加20℃,整体气温按25℃计算)。对于旋翼类飞行器,环境温度和空气密度对整机的性能影响非常大。如果选择海平面标准大气环境,对整机性能相对“友好”,但是需要考虑非海平面大气环境下的实际运营。
如果考虑飞行器的全天候运营,整机系统重量会增加一些,比如会增加旋翼防结冰装置。
方案设计
该飞行器设计为四轴旋翼布局。整机起飞重量1252lb(568Kg),设计巡航速度70节(130km/h)。出于整机噪声考虑,旋翼翼尖速度不大于450ft/s(137m/s)。同时,旋翼桨盘载荷为12.2Kg/㎡。对应旋翼直径为3.8m,桨盘实度0.0646。
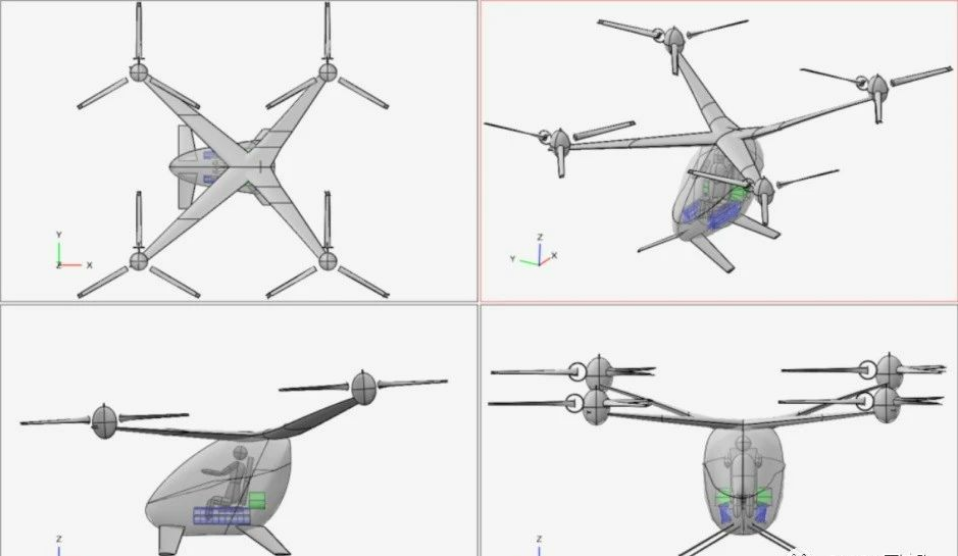
为保证飞行器有良好的配平能力,旋翼采用恒转速变总距控制(相较于变转速配平,变总距控制有更好的响应能力。变转速控制常见于微小型多旋翼飞行器)。进一步,为了降低整机前飞过程中的振动水平,提高操纵品质,旋翼设计有挥舞铰,尽管该设计会导致空机重量增加3%左右,并且会降低整机最大前飞速度。

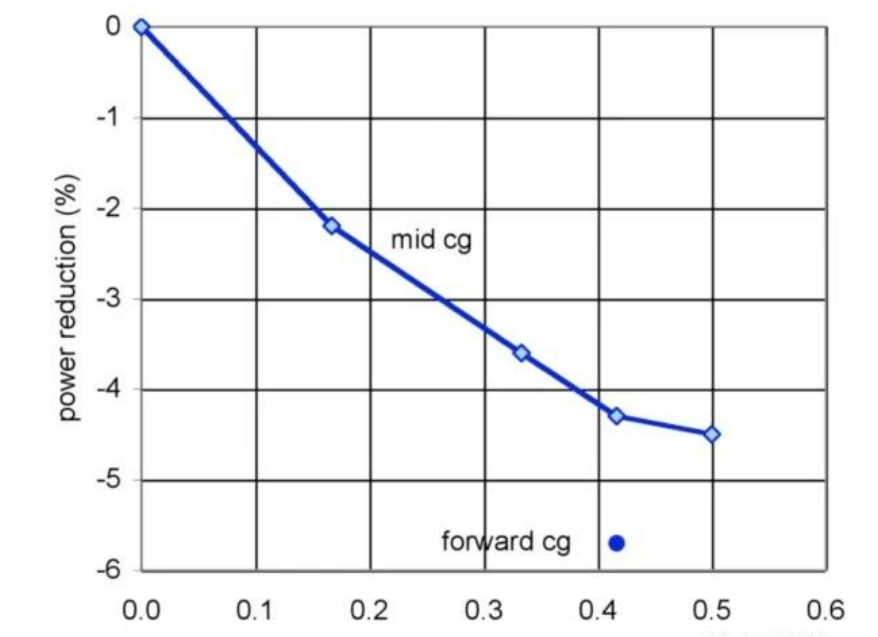
整机重心相较于四个旋翼中心点靠前0.9英尺(0.3m),这样做的目的是为了降低整机前飞功耗,提升操纵品质(一般来讲,四旋翼飞行器在前飞过程中,后方旋翼会产生更大的拉力,相应的功率也会更大。重心调节至靠前位置,会调节前后旋翼的拉力至相同水平,使其尽可能均工作在最佳效率点处)。出于同样的目的,后边两个旋翼相较于前边两个旋翼高0.7m左右。
下图定量给出了前后旋翼高度差对整机前飞功耗的影响。对于旋翼类飞行器而言,3%-5%功率优化意义重大。
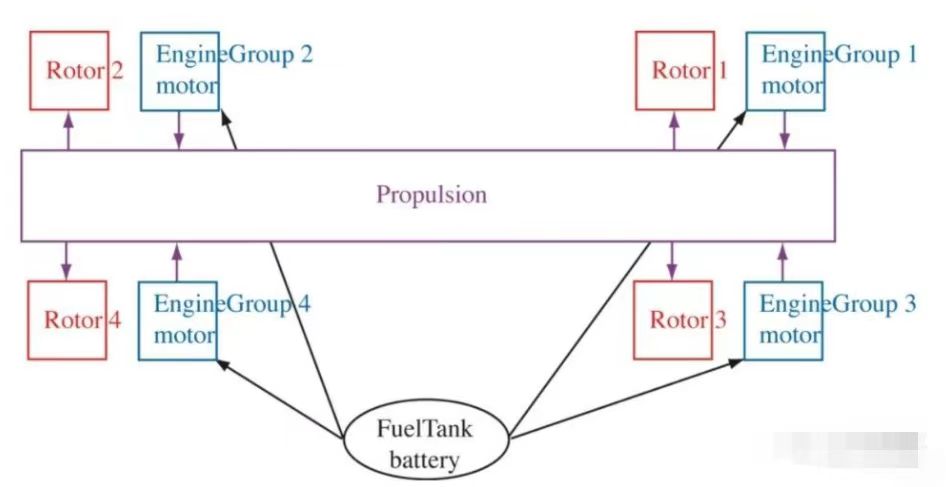
为提高整机的安全性和适航性(Safety and Airworthiness),四个电机通过中间轴连接,遇到单电机失效(OEI)时,仍可以提供足够的控制能力。当所有电机失效(AEI)时,旋翼和驱动轴可以断开连接,然后快速调节旋翼总距,使其以自旋的形式继续工作,保证整机能够安全降落。这也是该方案采用较低桨盘载荷的原因之一:提高飞行器的自旋降落性能。
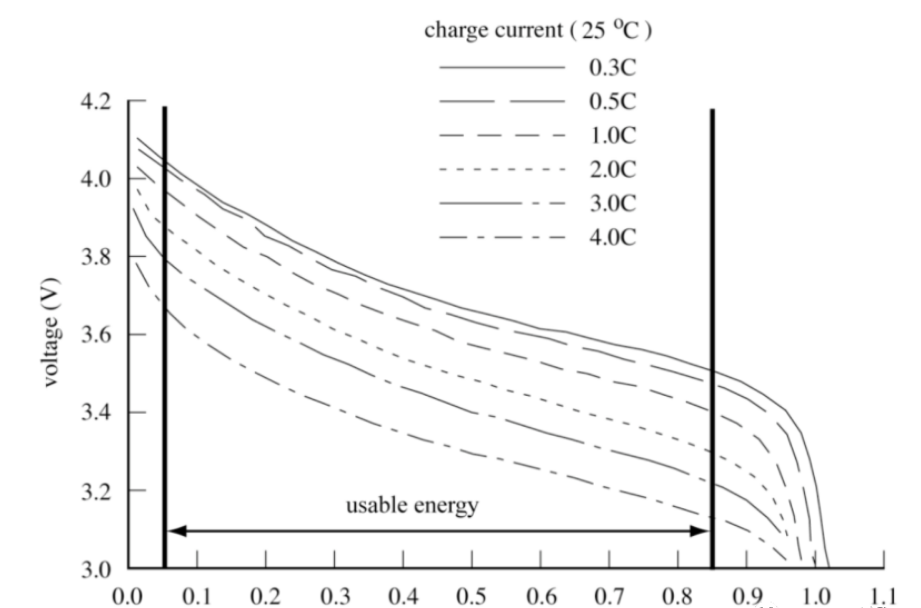
电池模型